Yaskawa Mh110 Robot Automated Palletizing Smart Warehouse Inbound and Outbound Application





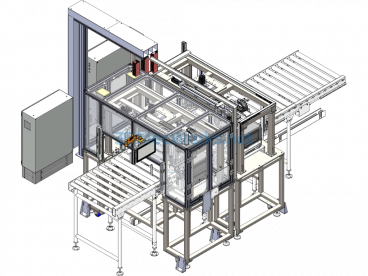
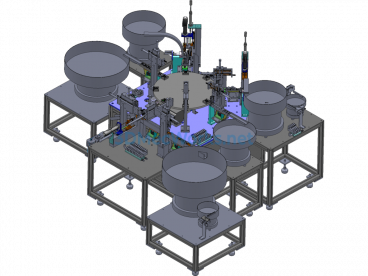
Special Reminder: The file is an application of automated warehouse and robot integration. The main function is that the robot stacks boxes on standard pallets into standard shapes, then transports them to the entrance of the target warehouse via a conveyor line. The shuttle of the automated warehouse then sends the loaded standard pallets at the warehouse entrance into the target storage location. At the same time, the shuttle can also retrieve items from the warehouse and place them at the warehouse exit, then transport them outside via the conveyor line, where a manual forklift will take away the loaded pallets.
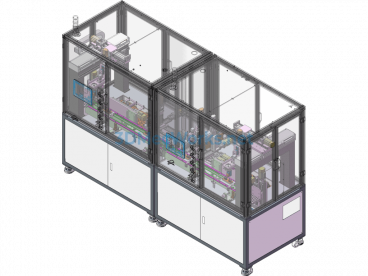
This file can be used as a reference for solution, detailed design, or workshop planning, etc. Due to the large file size, only two columns of the automated warehouse shelves and one shuttle are displayed in the file. If a larger warehouse is needed, it can be copied accordingly. Similarly, the supporting roller conveyor can be lengthened accordingly.
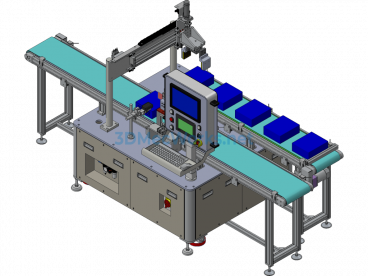
The main equipment includes Yaskawa MH110 six-axis articulated robot, automated warehouse shelves, automated warehouse shuttle, powered roller conveyor, belt conveyor, etc.
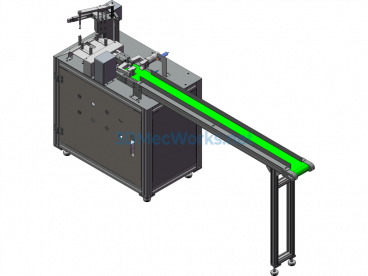
Inbound: Small boxes are transported to the vicinity of the robot via a belt conveyor from the previous process. The robot stacks the small boxes onto the pallet according to the standard shape. When the pallet is full, it is transported forward via the conveyor line, turned at the turntable conveyor, and then transported to the corresponding storage location, where it is placed into the warehouse by the shuttle. The robot then takes an empty pallet from the roller conveyor and continues to the next process. If the number of empty pallets is insufficient, the system will issue an alarm, and manual replenishment is required.
Outbound: The shuttle retrieves the target pallet to the outbound storage location according to the instructions. The target pallet is then transported to the designated position through the turntable conveyor and powered conveyor line, and finally taken away by a manual forklift.
The file is made with SolidWorks 2016, providing only .asm and .Prt files.
The robot model involved is a three-dimensional model of an industrial serial multi-joint robot, with SolidWorks version 2016. The position and movement range of each axis are set according to the parameters provided by the manufacturer. The reachable area of the robot is defined by the position that the end flange of the robot can reach. In SolidWorks 2016 and above, open the attached assembly file, and drag any part of the robot (except the base) with the mouse. The robot can move within the range of motion of each axis, visually displaying the robot’s working range.
1. How to assemble and customize this 3D model
If the top-level assembly file is A.asm, then the robot attachment is the sub-assembly B.asm under A.asm. If the end of the robot is equipped with a fixture, and there are no moving parts inside the fixture, then the fixture can be directly installed on the end flange. If the fixture has moving parts and needs to display moving parts, then the fixture should be defined as several parts according to the range and size of the moving parts and installed in sequence in B.asm.
2. How to freely drag the robot model in the assembly
Assemble the top-level assembly A.asm according to the above rules, open the assembly, right-click on the properties in the feature tree, open the properties tab, and select “Solve as Flexible” in the lower right corner. Then, in A.asm, you can freely move the joints and fixtures of the robot, which is convenient for displaying the robot’s reachable domain and details from different perspectives. Since the “Solve as Flexible” function occupies a large amount of memory and computing resources, it should be turned off when not in use.
3. Brief introduction to the main parameters of the model
The model mainly includes the length of the robot axis, the installation method of the axis, and the size of the movement angle of the axis. The length and appearance of the axis are designed and determined by the robot company. The installation method and movement angle size are defined and constrained according to the parameters provided by the robot company (latest parameters).
Ps1: Note on model usage: when the robot axes move to the limit position, forcibly dragging the mouse towards the limit position may cause the model to directly skip the restricted movement area and reach the non-restricted area. Especially for the J1 axis, the restricted area is relatively small, or it can rotate continuously over ±180 degrees. When using, please drag each axis slightly. When reaching the limited position, you will feel a pause. If you continue to drag, the robot will move to the restricted activity area. Other axes may have similar situations, which is a software bug or undefined, similar to the robot’s singularity.
PS2: The attachment provides a standard format STP-AP214 file, which is convenient for friends using SolidWorks versions lower than 2016 or other 3D software. After opening the stp, set the model parameters according to the attached parameters.
PS3: The parts and parameters of the model come from the public information of the robot company. This model is only for learning and demonstration. If used for industrial design or on-site production, please contact the robot supplier to verify the size and parameters of the model.
Specification: Yaskawa Mh110 Robot Automated Palletizing Smart Warehouse Inbound and Outbound Application
|
User Reviews
Be the first to review “Yaskawa Mh110 Robot Automated Palletizing Smart Warehouse Inbound and Outbound Application”
You must be logged in to post a review.


There are no reviews yet.