Variable Pitch Gripper





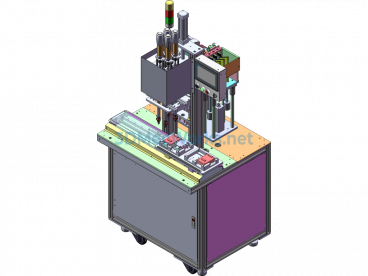
SolidWorks 2015 software is used to design a variable-pitch gripper suction cup manipulator. The content achieves pneumatic variable pitch and suction cup gripping, reducing reliance on human labor and saving manpower. It uses a motor drive to rotate the lead screw, thus enabling the gripping and releasing actions. The design includes parameters that can be modified, offering high reference value for industry peers. It serves as a learning tool.
Includes common formats STP and X-T.
Specification: Variable Pitch Gripper
|
User Reviews
Be the first to review “Variable Pitch Gripper”
You must be logged in to post a review.




There are no reviews yet.