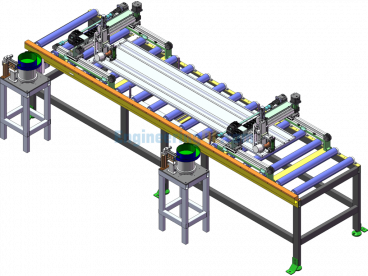
Small robotic gripper, automatic 180-degree handling, a type of handling gripper manipulator, includes: a frame, a servo motor, a reducer, a left and right rotating screw rod, a holding fixed plate mechanism, and a gripping plate; an adjustable screw rod seat is installed on the frame, with the left and right rotating screw rods mounted on it; the servo motor is connected to the reducer to drive its operation; the reducer is connected to the left and right rotating screw rods to drive their rotation; the gripping plate is connected to the right-hand thread section of the left and right rotating screw rods; the holding fixed plate mechanism includes a connecting seat, a holding fixed plate, a slide block, and a clamping cylinder; the connecting seat is connected to the left-hand thread section of the left and right rotating screw rods; a slide rail parallel to the left and right rotating screw rods is set on the connecting seat, with the slide block nested on the slide rail; the holding fixed plate is fixed on the slide block; the clamping cylinder is fixed on the connecting seat, and the output end of the clamping cylinder is connected to the holding fixed plate.








There are no reviews yet.