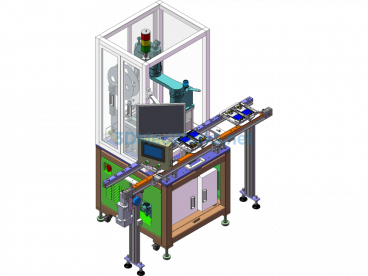
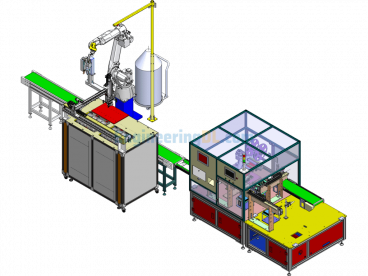
Robot Palletizing Solution





The robot performs 3D depalletizing of various sized boxes from the mixed palletizing position and places them on the conveyor line. The conveyor line randomly throws all the boxes onto the mixed storage position. Using a 3D vision system, the robot measures the dimensions of the boxes. After planning and calculation, it re-stacks them one by one onto the mixed palletizing position. Each time, the shape is different. If the process requires the box to be flipped for side gripping, the robot will first place the box on the correction unit for flipping and adjustment.
Specification: Robot Palletizing Solution
|
User Reviews
Be the first to review “Robot Palletizing Solution”
You must be logged in to post a review.


There are no reviews yet.