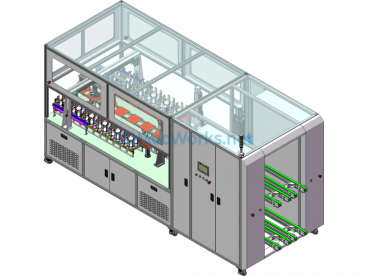
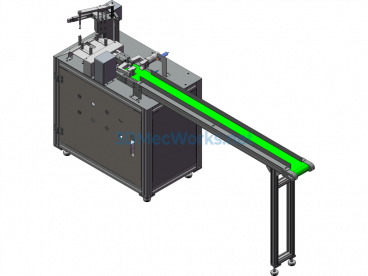
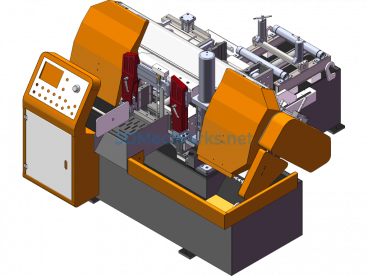
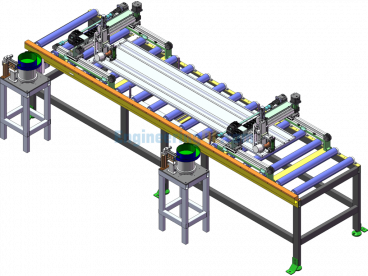
Robot





3D model of the robot designed in SW2012 provided in sldasm and sldprt files.
The robot body and its arms generally use a spatial open-chain linkage mechanism. The high-tech product of robots (18 images) includes motion pairs (revolute pairs or prismatic pairs) commonly referred to as joints. The number of joints typically equals the degrees of freedom of the robot. Based on the different configurations of joints and forms of motion coordinates, robot actuators can be classified into types such as Cartesian coordinate type, cylindrical coordinate type, spherical coordinate type, and articulated coordinate type.
For the sake of anthropomorphism, relevant parts of the robot body are commonly referred to as the base, waist, arm, wrist, hand (gripper or end-effector), and the walking part (for mobile robots), among others.
Specification: Robot
|



There are no reviews yet.