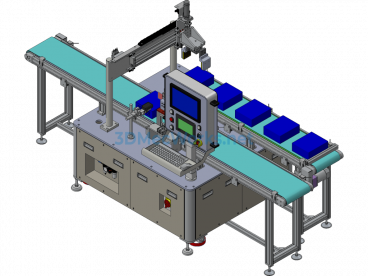
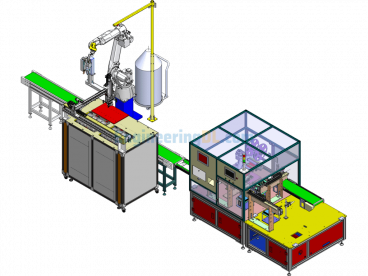
Parallel Transmission Mechanism





The characteristics of parallel mechanisms lie in their ability to overcome the fundamental limitations that traditional serial mechanisms in robotics struggle to surpass. The excessive weight of the frame and motion axes causes structural bending and deformation. Parallel mechanisms can avoid the cumulative errors of the drive axes caused by serial mechanisms, and at the same time, provide an averaging effect on geometric errors.
Specification: Parallel Transmission Mechanism
|
User Reviews
Be the first to review “Parallel Transmission Mechanism”
You must be logged in to post a review.


There are no reviews yet.