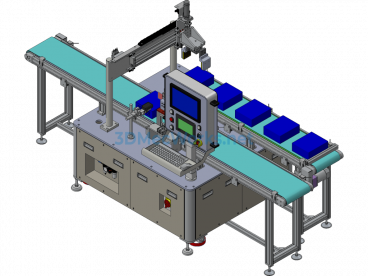
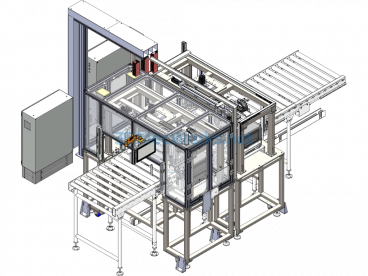
Notebook Inspection and Assembly Automation





Manual feeding method, using a 6-axis robotic arm with vision guidance to position and grab the touch screen. A secondary visual inspection is used for appearance and dimension measurement. The computer housing is manually fed and side-clamped for positioning. The housing is mounted on a precision fine-tuning platform equipped with vision and robotic arm positioning compensation. A locking robotic arm equipped with a tight electric screwdriver completes the fastening action. After assembly, the equipment rechecks and determines OK/NG. The equipment has been put into production and is running stably.
Specification: Notebook Inspection and Assembly Automation
|
User Reviews
Be the first to review “Notebook Inspection and Assembly Automation”
You must be logged in to post a review.



There are no reviews yet.