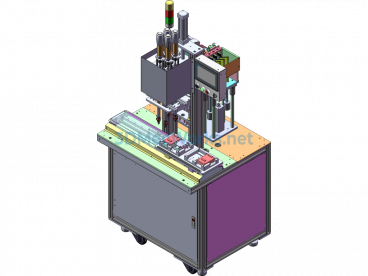
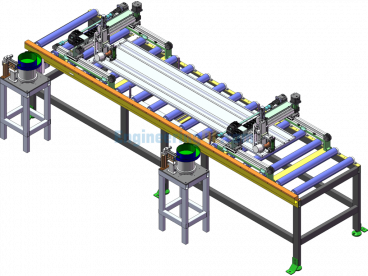
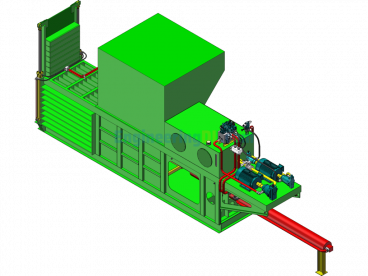
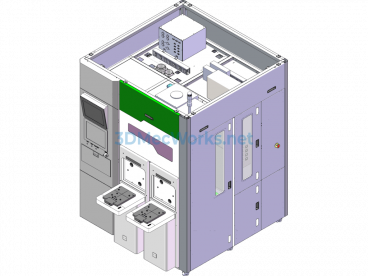
Non-Standard Automated Assembly Line Equipment Final Assembly





The mechanism of this equipment is designed by SW2016 and includes part features. It is a non-standard automation custom design, and the drawings have been used in actual production, featuring many classic structures. Most of the 3D models shown include a complete independent robotic arm for material handling. The involved linear motion modules and servo/stepper motor selection parameters meet the actual calculation requirements. The control system adopts a host computer with C++/C# combined with CCD vision recognition or uses PLC multi-axis point motion single motion control. The linear slide selection is mainly Hiwin/THK, the cylinder selection is Airtac/Festo, and the sensor selection is mainly Keyence/Jaguar/Omron. The overall structure is clear, parts are complete, and the design is reasonable, making it an ideal material for design reference or study. It is only for peer reference and should not be used for processing production according to the original model dimensions! The complete decompression includes STP and UG general editable formats.
Specification: Non-Standard Automated Assembly Line Equipment Final Assembly
|
User Reviews
Be the first to review “Non-Standard Automated Assembly Line Equipment Final Assembly”
You must be logged in to post a review.



There are no reviews yet.