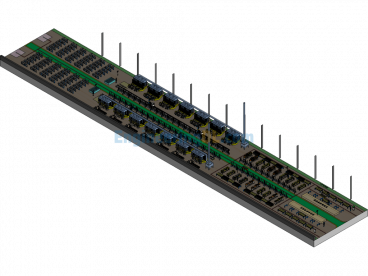
N-Type Pneumatic Mechanical Gripper





This set of models is for the N-type trajectory mechanical claw in transformer testing equipment. It utilizes a rotary cylinder and a cross-slider mechanism. A collision sensor is added to the Z-axis to allow for a 3mm impact, preventing rigid collisions. The file also includes formats such as SLDASM/STP/IGS/EASM/X_T for easy download and use.
Specification: N-Type Pneumatic Mechanical Gripper
|
User Reviews
Be the first to review “N-Type Pneumatic Mechanical Gripper”
You must be logged in to post a review.



There are no reviews yet.