Material Handling Robot Arm





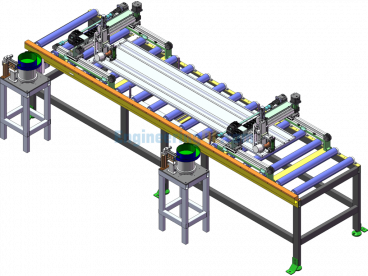
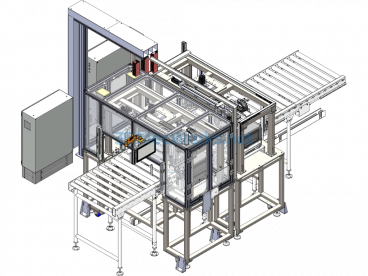
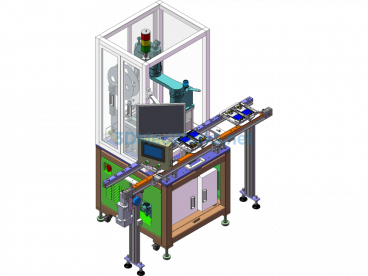
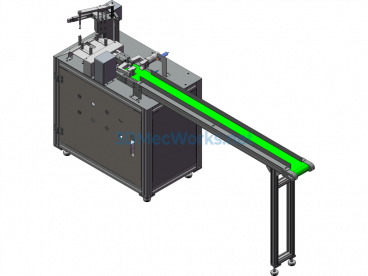
This drawing is a 3D model of a material handling mechanism composed of an ABB six-axis robot. It uses a vacuum suction cup method for material handling, suitable for the gripping of small electronic components. It includes a guiding mechanism and an ejection mechanism. The drawing contains all necessary parts and is worth referencing and studying. Download is welcome.
Specification: Material Handling Robot Arm
|
User Reviews
Be the first to review “Material Handling Robot Arm”
You must be logged in to post a review.



There are no reviews yet.