Machine Tool Loading and Unloading Robot Arm (graduation Project)
 - SolidWorks - Free Download")
 - SolidWorks - Free Download")
 - SolidWorks - Free Download")
 - SolidWorks - Free Download")
 - SolidWorks - Free Download")
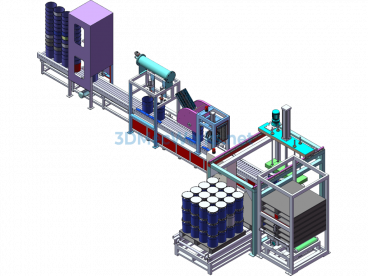
The loading and unloading robotic arm primarily achieves full automation of the machine tool manufacturing process and employs integrated processing technology. It is suitable for applications such as loading and unloading on production lines, workpiece flipping, and workpiece transfer. In domestic machining, many current practices involve using special machines or manual operations for loading and unloading machine tools. This approach is quite suitable when products are relatively singular and production capacity is not high. However, with societal advancement and development, the continuous progress of technology, and the accelerated pace of product updates, using special machines or manual operations for loading and unloading machine tools reveals many shortcomings and weaknesses. On one hand, special machines have a large footprint, complex structures, and are inconvenient to maintain, which is not conducive to the production of automated assembly lines. On the other hand, they lack flexibility and struggle to adapt to the rapidly accelerating changes, hindering the adjustment of product structures. Additionally, manual operations increase labor intensity, are prone to workplace accidents, have relatively low efficiency, and the stability of product quality with manual loading and unloading is insufficient, failing to meet the demands of mass production.
Specification: Machine Tool Loading and Unloading Robot Arm (graduation Project)
|
User Reviews
Be the first to review “Machine Tool Loading and Unloading Robot Arm (graduation Project)”
You must be logged in to post a review.


There are no reviews yet.