Identifying the Robotic Arm





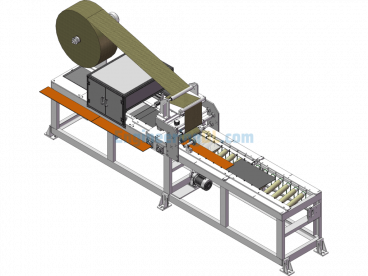
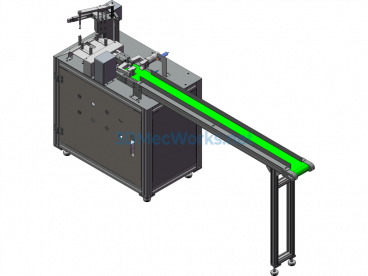
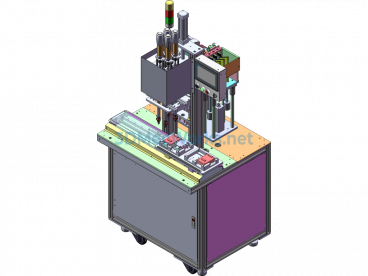
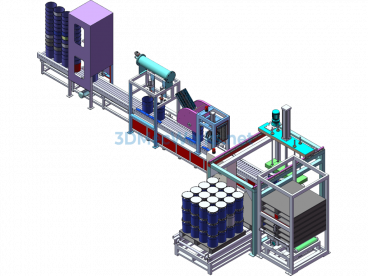
The manipulator shown in this design has complete components, can be edited, and is mainly used for picking and placing rod-like parts and can also pick up garbage. It features an image recognition device on the gripper head, allowing it to recognize items, grasp them after identification, and place them in designated locations based on the recognition results.
Specification: Identifying the Robotic Arm
|
User Reviews
Be the first to review “Identifying the Robotic Arm”
You must be logged in to post a review.



There are no reviews yet.