Golf Ball Robot (integrated Ball Collection/transport/distribution/shooting)
 - SolidWorks AutoCAD.Mechanical - Free Download")
 - SolidWorks AutoCAD.Mechanical - Free Download")
 - SolidWorks AutoCAD.Mechanical - Free Download")
 - SolidWorks AutoCAD.Mechanical - Free Download")
 - SolidWorks AutoCAD.Mechanical - Free Download")
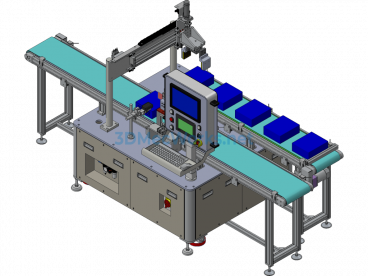
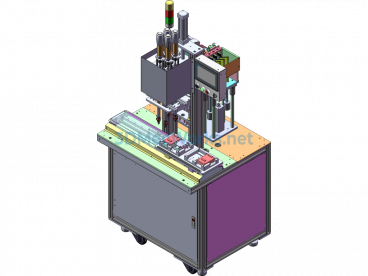
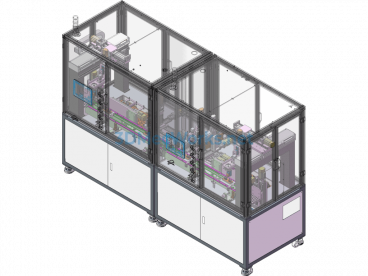
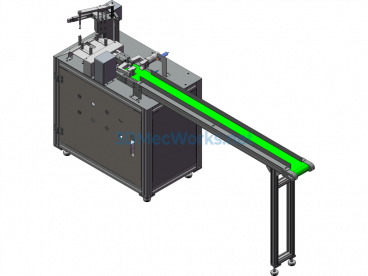
This is a golf ball robot that integrates ball collecting, ball carrying, ball distributing, and ball shooting. The robot can move omnidirectionally on a plane and supports global positioning. The compressed package includes the part drawings and assembly drawings of the said model, and the illustrations shown are also in the compressed package. It can collect balls scattered on the ground and store them in the machine’s container. The machine also has a launching device that can shoot the collected balls into a fixed container. This case robot can be used to pick up scattered golf balls, ping pong balls, tennis balls, etc., greatly saving manpower. The drawing format is correct and includes editable feature parameters. Welcome to download.
Specification: Golf Ball Robot (integrated Ball Collection/transport/distribution/shooting)
|
User Reviews
Be the first to review “Golf Ball Robot (integrated Ball Collection/transport/distribution/shooting)”
You must be logged in to post a review.



There are no reviews yet.