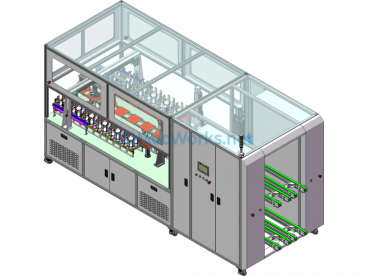
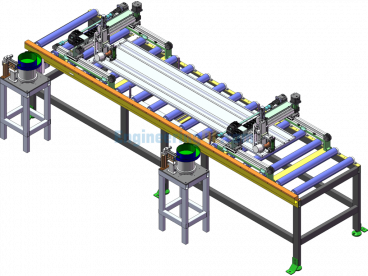
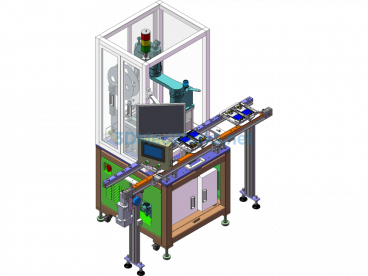
Eleq Non-Standard Automated Assembly Equipment





This equipment mechanism is designed using SW2016 and includes part features. It is a non-standard automation custom design, and the drawings have been used for actual production, featuring many classic structures. Most of the displayed 3D model equipment designs have a complete independent robotic arm for material handling. The linear motion modules involved and the servo/stepper motor selection parameters meet actual calculation requirements. The control system employs an upper computer with C++/C# and CCD vision recognition or uses PLC for multi-axis point single-action control. Linear slide selection is primarily Hiwin/THK, cylinder selection is Airtac/Festo, and sensor selection mainly includes Keyence/GF/Omron. The overall structure is clear, parts are complete, and the design is reasonable, making it an ideal reference or learning material for design. It is intended only for peer reference; note that processing and production should not follow the original model sizes! The complete decompression contains STP and UG common editable formats.
Specification: Eleq Non-Standard Automated Assembly Equipment
|
User Reviews
Be the first to review “Eleq Non-Standard Automated Assembly Equipment”
You must be logged in to post a review.




There are no reviews yet.