Design of Three-Station Feeding and Coordinated Manipulator Material Handling Equipment





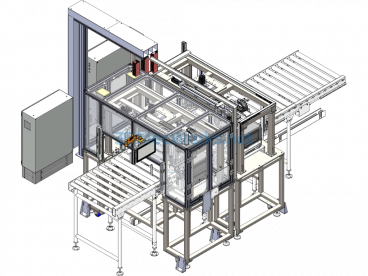
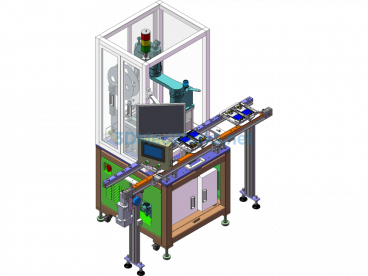
Design of Three-Station Feeding and Coordinate Robotic Arm Material Handling Equipment: This model is an integrated device for loading and material handling. The loading mechanism consists of three sets of servo systems, and the material handling robotic arm is a three-axis servo coordinate robotic arm. The loading mechanism delivers materials to the material handling position, where the three-axis servo coordinate robotic arm starts the material handling process, completing the delivery action to the operation station. The upload format is XT. Welcome to download.
Specification: Design of Three-Station Feeding and Coordinated Manipulator Material Handling Equipment
|
User Reviews
Be the first to review “Design of Three-Station Feeding and Coordinated Manipulator Material Handling Equipment”
You must be logged in to post a review.

Design of Three-Station Feeding and Coordinated Manipulator Material Handling Equipment

There are no reviews yet.