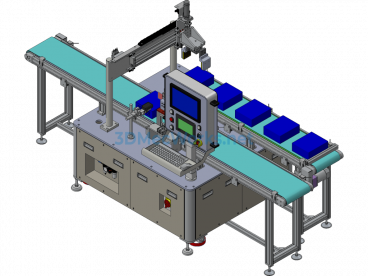
Design of Three-Axis Servo Vacuum Suction Cup Material Handling Robot





Three-Axis Servo Vacuum Suction Cup Material Handling Robot Design: This model is designed as a set of three-axis robotic arms, intended for material handling. The end of the arm is equipped with a vacuum suction cup for material adsorption and gripping. The travel precision of all three axes is controlled using servo modules. The upload format is X-T.
Specification: Design of Three-Axis Servo Vacuum Suction Cup Material Handling Robot
|
User Reviews
Be the first to review “Design of Three-Axis Servo Vacuum Suction Cup Material Handling Robot”
You must be logged in to post a review.

Design of Three-Axis Servo Vacuum Suction Cup Material Handling Robot


There are no reviews yet.