




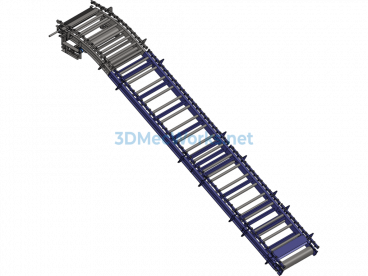
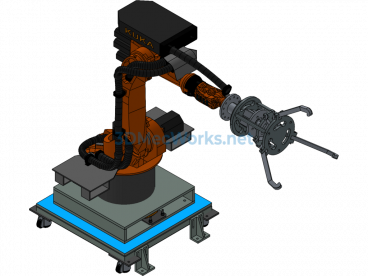
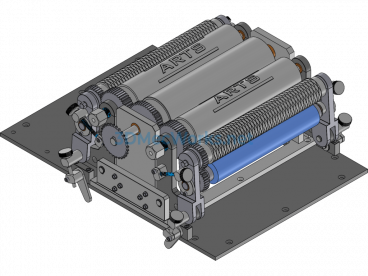
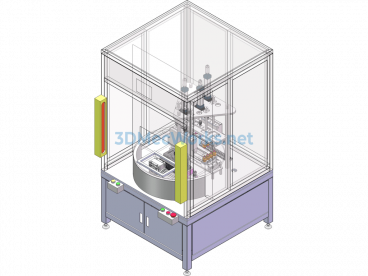
Design of Equidistant Robot Gripper: This uploaded model is an end-effector gripper design for a robot. The gripper mechanism is driven by a rodless cylinder to enable equidistant movement, and the gripping method uses vacuum adsorption. The robot is designed with a mobile track to increase its working radius. Uploaded in XT format. Welcome to download.
Specification: Design of Equidistant Robot Gripper
|





There are no reviews yet.