Design of a Large Three-Axis Vacuum Gripper Robot





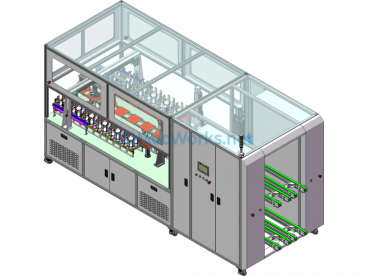
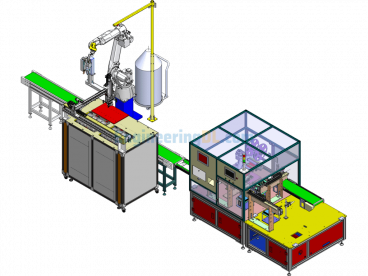
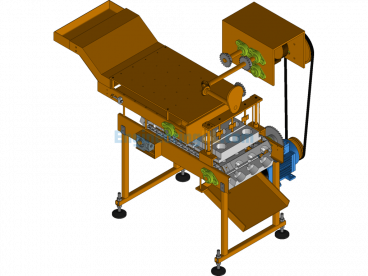
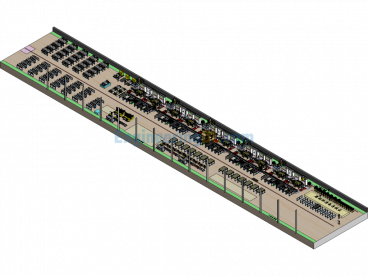
Design of a Large Three-Axis Vacuum Gripper Robot: This model is a design of a three-axis pneumatic cylinder robot gripper. It utilizes a parallel centering grip method, employing vacuum adsorption to grasp materials. It is capable of handling materials such as cartons and sheet metal. The upload format is X-T.
Specification: Design of a Large Three-Axis Vacuum Gripper Robot
|
User Reviews
Be the first to review “Design of a Large Three-Axis Vacuum Gripper Robot”
You must be logged in to post a review.



There are no reviews yet.