Cylindrical Coordinate Industrial Robotic Arm
 - Free Download")
 - Free Download")
 - Free Download")
 - Free Download")
 - Free Download")
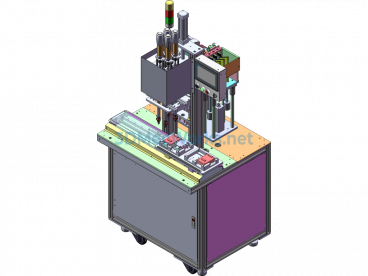
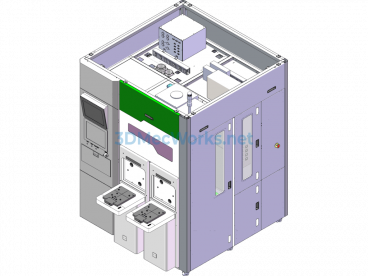
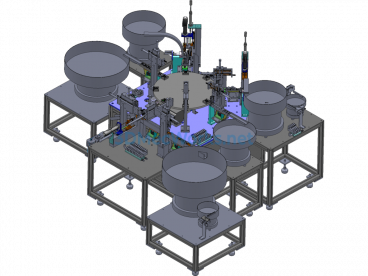
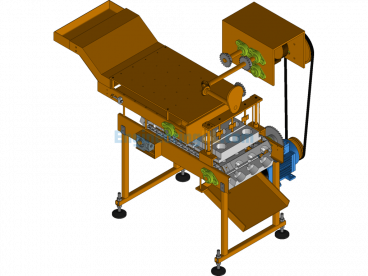
Cylindrical coordinate industrial robotic arm 3D model, UG design, prt file sharing, a total of 580 documents!
The robot has three rotary joints, whose axes are parallel to each other, allowing positioning and orientation within a plane. Another joint is a translational joint, used to complete the end effector’s movement perpendicular to the plane.
User Reviews
Be the first to review “Cylindrical Coordinate Industrial Robotic Arm”
You must be logged in to post a review.



There are no reviews yet.