Automobile Rearview Mirror Motor Assembling Machine





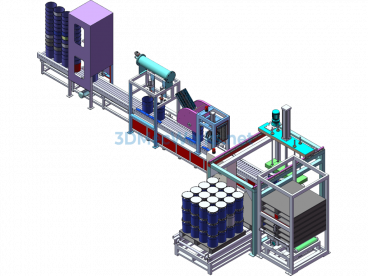
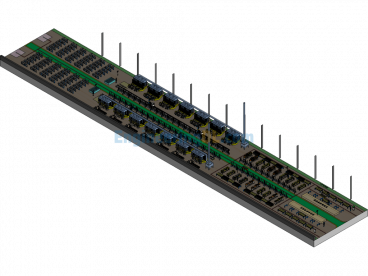
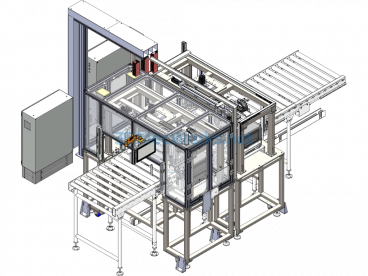
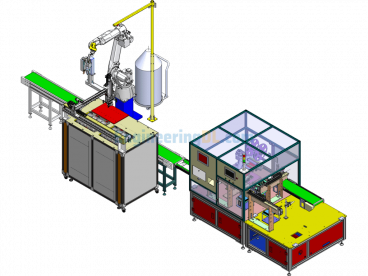
This device is a motor assembly equipment for automotive rearview mirror assembly. It works by using dual-cavity tray automatic loading and unloading equipment to separate trays. Then a four-axis robot arm extracts the motor, positions it into a secondary positioning jig, screws are distributed through a vibrating bowl, and assembly takes place in the assembly jig. Finally, a transfer axis moves the assembled unit to the next station. The document includes files in STP format, which are available for download and reference!
Specification: Automobile Rearview Mirror Motor Assembling Machine
|
User Reviews
Be the first to review “Automobile Rearview Mirror Motor Assembling Machine”
You must be logged in to post a review.



There are no reviews yet.