A10-Tray Automatic Loading and Grabbing Station (including Dfm)
 - SolidWorks - Free Download")
 - SolidWorks - Free Download")
 - SolidWorks - Free Download")
 - SolidWorks - Free Download")
 - SolidWorks - Free Download")
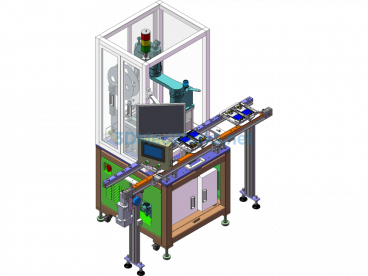
A10-Tray Automatic Loading and Grabbing Station Action Process:
1. The tray is manually loaded into the device, with one set positioned on the left and right for continuous loading without stopping the machine;
2. The six-axis robot arm with pneumatic gripper picks and places the product into the feeding line;
3. The feeding line has photoelectric sensing to check for correct placement;
4. If there is an issue with the detection position, the robot arm places it in an auxiliary mechanism for clamping and positioning before placing it back into the feeding line for loading;
Specification: A10-Tray Automatic Loading and Grabbing Station (including Dfm)
|
User Reviews
Be the first to review “A10-Tray Automatic Loading and Grabbing Station (including Dfm)”
You must be logged in to post a review.

A10-Tray Automatic Loading and Grabbing Station (including Dfm)


There are no reviews yet.