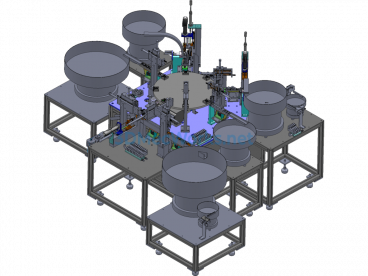
2×2 Array Cross Gripper Pneumatic Mechanical Gripper





The set of drawings is for a model of XZ-axis manipulator. The gripper features a pneumatic mechanical claw design, and the Z-axis of the gripper includes an anti-collision mechanism. An alarm triggers if the Z-axis contact triggers the pre-warning photoelectric sensor, preventing potential collisions.
The 2×2 formation achieves displacement with left-right asymmetry by using a synchronous belt mechanism. The end-axis transmission is driven by a 57-stepper motor and an S3M synchronous belt mechanism.
The XZ-axis utilizes a Hiwin 86 structural module paired with a Panasonic servo motor. The mechanism is used in the loading and transferring mechanism of inductive transformer testing equipment.
Specification: 2×2 Array Cross Gripper Pneumatic Mechanical Gripper
|
User Reviews
Be the first to review “2×2 Array Cross Gripper Pneumatic Mechanical Gripper”
You must be logged in to post a review.




There are no reviews yet.