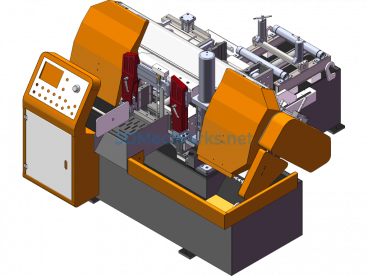
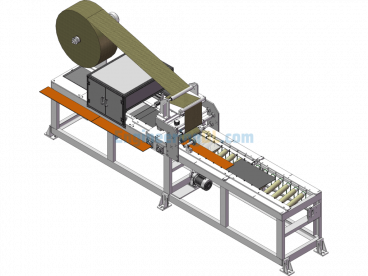
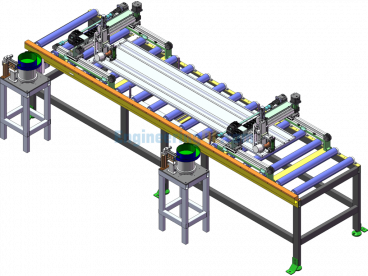
Lateral Movement and Rotation Linkage Manipulator





The transverse rotary linkage robot arm is used for material picking and placing. While the translation cylinder transverses, it drives the linkage to rotate the picking jig, thereby causing the material to move and rotate. The gripping mechanism can be independently designed with a suction cup or gripper, etc. The mechanism is simple and cost-effective, suitable for scenarios where objects need to be translated and rotated 90° simultaneously. It includes an STP format file.
Specification: Lateral Movement and Rotation Linkage Manipulator
|
User Reviews
Be the first to review “Lateral Movement and Rotation Linkage Manipulator”
You must be logged in to post a review.




There are no reviews yet.