Design of Heavy Load Servo Rack and Pinion Manipulator





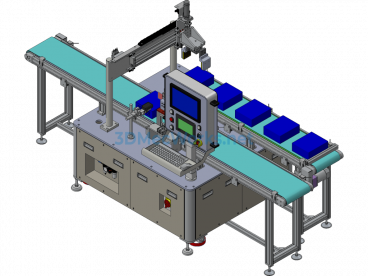
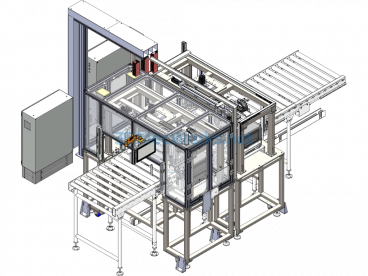
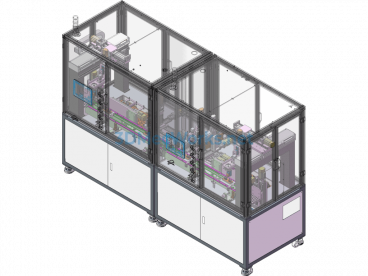
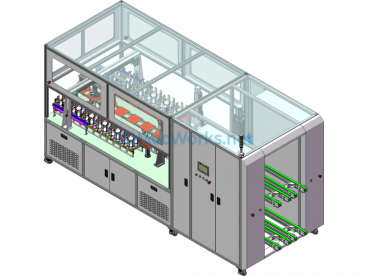
The uploaded model is a design of a non-standard robotic arm. The robotic arm has a mechanism for linear movement and rotational motion, enabling it to grab and process products at multiple spatial positions within its working radius. The driving method employs precise servo control. You are welcome to download it. The upload format is X-T.
Specification: Design of Heavy Load Servo Rack and Pinion Manipulator
|
User Reviews
Be the first to review “Design of Heavy Load Servo Rack and Pinion Manipulator”
You must be logged in to post a review.

Design of Heavy Load Servo Rack and Pinion Manipulator

There are no reviews yet.