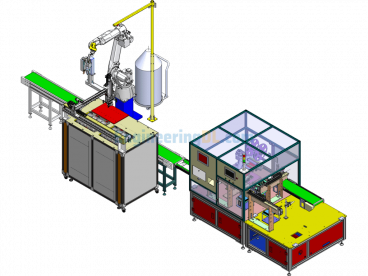
Pneumatic Gripper-Type Handling Mechanism





The device is a pneumatic gripper-type handling mechanism in the X-Z configuration, capable of quickly handling small items.
The entire mechanism is driven by a servo motor that transmits via a timing belt. For the Z-direction, a cylinder is used to achieve movement between two points on the Z-axis.
Products are placed on a carrier above the cylinder for transport, making the process convenient, simple, and cost-effective.
Specification: Pneumatic Gripper-Type Handling Mechanism
|
User Reviews
Be the first to review “Pneumatic Gripper-Type Handling Mechanism”
You must be logged in to post a review.



There are no reviews yet.