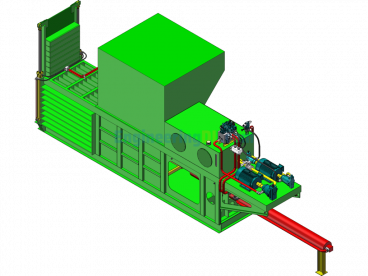
The ABB-delta robot design model is mainly composed of three parts: the hand, the motion mechanism, and the control system. The hand is the component used to grasp workpieces (or tools) and is designed in various structural forms depending on the shape, size, weight, material, and operational requirements of the object being grasped, such as clamping type, holding type, and adsorption type. The motion mechanism enables the hand to perform various rotations (swings), movements, or compound motions to accomplish specified actions and change the position and posture of the object being grasped. The independent motion methods of the motion mechanism, such as lifting, telescoping, and rotating, are referred to as the robot’s degrees of freedom. To grasp objects in any position and orientation in space, parameters are included, which can be edited and opened with SOLIDWORKS 2010. The drawings are quite vivid and realistic. You are welcome to download and study them, as they are excellent learning materials.







There are no reviews yet.