Chx-3 Six-Axis Robot





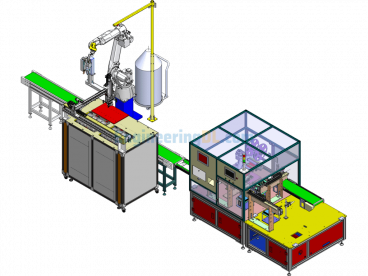
CHX-3 Six-Axis Robot 3D Model is a standard six-axis industrial robot with a complete internal structure. Welcome to download!
The robotic arm design model is mainly composed of three major parts: the executing mechanism, the driving mechanism, and the control system. The hand is the component used to grip workpieces (or tools), and it has a variety of structural forms depending on the shape, size, weight, material, and operational requirements of the object to be gripped, such as clamping type, holding type, and adsorption type. The motion mechanism allows the hand to perform various rotations (swings), movements, or compound motions to achieve specified actions and change the position and posture of the object being gripped. The independent motion modes of the motion mechanism, such as lifting, telescoping, and rotating, are referred to as the degrees of freedom of the robot. To grip objects at any position and orientation in space, six degrees of freedom are required. Degrees of freedom are a key parameter in the design of robotic arms. The more degrees of freedom, the greater the flexibility and versatility of the robotic arm, and its structure becomes more complex. Generally, specialized robotic arms have 2 to 3 degrees of freedom. The control system completes specific actions by controlling the motors for each degree of freedom of the robotic arm. It simultaneously receives feedback from sensors to form a stable closed-loop control. The core of the control system is usually composed of microcontroller chips such as microcontrollers or DSPs, implementing the desired functions through programming.
Specification: Chx-3 Six-Axis Robot
|



There are no reviews yet.