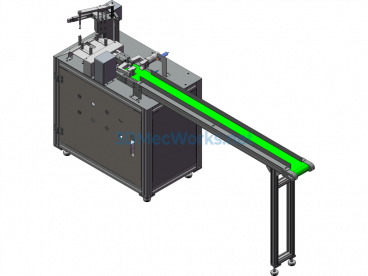
Non-Standard Handling Robot Arm





This is a non-standard manipulator, and the software used for design is SolidWorks 2012. Its main function is to remove products from the assembly line for unloading by driving a belt with a stepper motor. Generally speaking, this method is one of the most commonly used for loading and unloading. It offers better precision compared to cylinders, so this structure is quite a good non-standard option. After downloading, everyone can use it for modification or directly for simulation, making the design process more convenient.
Specification: Non-Standard Handling Robot Arm
|
User Reviews
Be the first to review “Non-Standard Handling Robot Arm”
You must be logged in to post a review.




There are no reviews yet.