Parallel Manipulator





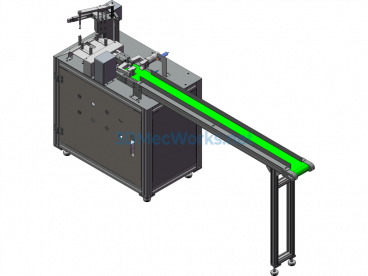
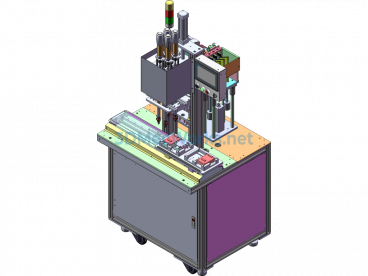
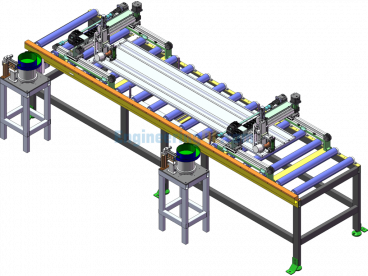
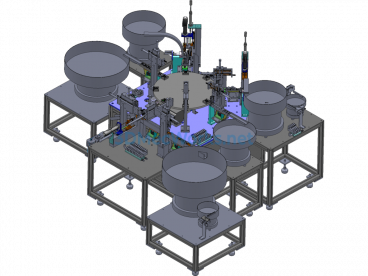
The design model of the parallel manipulator is an automatic operating device capable of mimicking certain functional movements of human hands and arms, used to grasp, transport objects, or operate tools according to fixed programs. This model is completed using SolidWorks for modeling and design, with detailed editable parameters. Those interested are welcome to download and study.
Specification: Parallel Manipulator
|



There are no reviews yet.