Dry Field Rice Transplanter





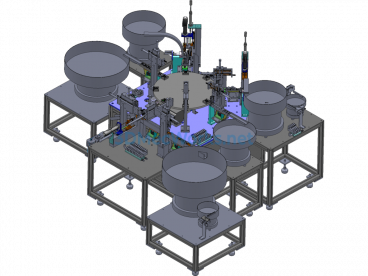
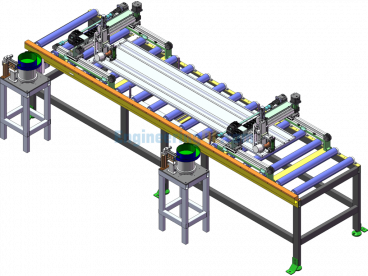
The manual focuses on the design of a dry land transplanter, targeted at the planting requirements of Chinese medicinal herbs, with the goal of full automation. The dry land transplanting is broken down into five major modules: the automatic seedling separation system, seedling transport system, transplanting system, pressing and watering system, and power system. Gradually, the structural design, 3D modeling, assembly, and motion simulation are completed. Ultimately, it aims to achieve functions such as tractor towing for movement, automatic seedling separation and transplanting, zero slip entry of seedlings into the soil, adjustable planting depth, row spacing, and plant spacing, stable seedling spacing unaffected by vehicle speed, soil covering, and intermittent watering. The manual designs more than twenty kinds of mechanisms, including the seedling clamping device in the automatic seedling separation system, the tray feeding mechanism, long-stroke reciprocating mechanism, seedling lifting mechanism, intermittent seedling conveying mechanism in the seedling transport system, intermittent seedling releasing mechanism, ‘zero’ speed transplanting mechanism in the transplanting system, duckbill automatic opening mechanism, speed change mechanism in the power system, pressing mechanism, intermittent watering mechanism, and pressing wheel adjustment mechanism, etc. The key components in the main mechanisms undergo strength verification. Simulation experiments show that the device can effectively meet the process requirements for planting medicinal herbs on dry land.
Specification: Dry Field Rice Transplanter
|
User Reviews
Be the first to review “Dry Field Rice Transplanter”
You must be logged in to post a review.





There are no reviews yet.