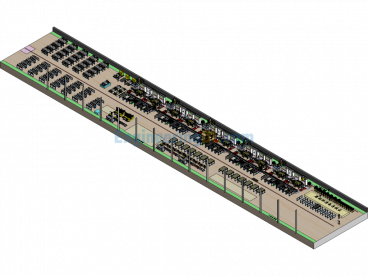
Automated Packaging Line – Packing, Sorting, and Stacking Equipment Line System





Automated Packaging Line
1. The PCB board is manually placed at the designated position and evenly fed; it is recognized by CCD photography and moves to the designated distribution position and enters a small line body; then it is picked up by a robotic arm for inspection. After inspection, NG (No Good) items are placed in a defective product box for manual processing, while OK products are placed on a turnover line for the turnover operation. After the turnover is completed, they are clamped by a cylinder and transported to the boxing position, sequentially placed into cardboard boxes. Once boxing is completed, the boxes are packed and sealed by a packing machine. Finally, the robotic arm categorizes and stacks the packed boxes onto pallets.
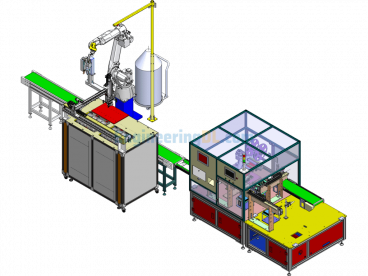
2. The use of a six-axis robotic arm greatly improves work efficiency, and its compact structure saves space.
After the PCB board is flipped 90° and clamped by the pickup claw, the PCB board is removed from the turnover line, and horizontally transported to the boxing position. Before boxing, the module expands to hold the knife card, then the expansion module is removed for inserting the board. The sliding platform can hold 1-2 packing boxes. The packing boxes are first blocked by the mid-position blocking cylinder. After inserting the first row of PCB boards, the mid-position blocking cylinder descends, allowing the motor to push the packing boxes to the rear limit block position for the second row of PCB boards. Once insertion is completed, the box pushing cylinder transports the filled packing boxes to the roller conveyor line for the next packaging process.
Specification: Automated Packaging Line – Packing, Sorting, and Stacking Equipment Line System
|
User Reviews
Be the first to review “Automated Packaging Line – Packing, Sorting, and Stacking Equipment Line System”
You must be logged in to post a review.




There are no reviews yet.