Robot Grasp Detection Equipment (including Dfm)
 - Exported - Free Download")
 - Exported - Free Download")
 - Exported - Free Download")
 - Exported - Free Download")
 - Exported - Free Download")
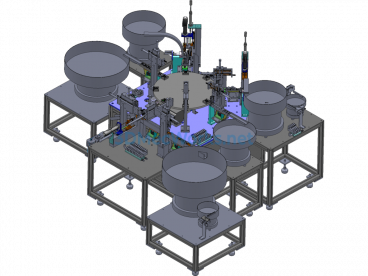
Robot Grabbing Detection Machine Action Flow:
1. Empty tray line feeding, module grabbing and positioning;
1-1. Carrier with material flows into the equipment;
2. Module grabs the carrier into position;
3. Manipulator grabs the product inside the carrier and places it into the rotating station;
4. Rotates 6 stations to detect the product;
5. After completion, manipulator grabs inside the tray;
6. After the manipulator grabs, the product is placed inside the tray;
7. Tray elevator storage, completes exit manual unloading;
Specification: Robot Grasp Detection Equipment (including Dfm)
|
User Reviews
Be the first to review “Robot Grasp Detection Equipment (including Dfm)”
You must be logged in to post a review.




There are no reviews yet.